China, 11th Oct 2025 – AgiBot officially announced on September 23 that its general embodied base model, GO-1 (Genie Operator-1), had also been open-sourced on GitHub, following the open-sourcing of the AgiBot World embodied intelligence million-real-robot dataset in January this year. It has become the world’s first general embodied intelligence model adopting the Vision-Language-Latent-Action (ViLLA) architecture to be freely available to developers worldwide, which will lower the technical barriers to embodied intelligence and accelerate industry development.
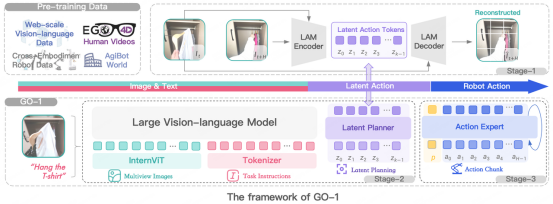
As a significant technological breakthrough in the field of embodied intelligence, the ViLLA architecture adopted by GO-1 successfully bridges the semantic gap between image-text input and robot action execution by introducing implicit action tokens. This architecture employs a three-tier collaborative design:
- the VLM multimodal understanding layer, built on InternVL-2B, processes multimodal information such as multi-view visual images, force feedback signals, and language input, providing the system with superior scene perception and command understanding capabilities.
- the Latent Planner accomplishes high-level understanding and planning of complex tasks by predicting implicit action tokens.
- the Action Expert leverages a diffusion model to generate high-frequency, precise continuous action sequences, ensuring the robot performs delicate operations. Compared to traditional VLA architectures, ViLLA demonstrates improvements in action understanding and execution precision.
Furthermore, AgiBot has developed Genie Studio specifically for embodied intelligence scenarios, serving as a one-stop development platform that provides developers and partners with a full-stack solution. The platform offers comprehensive support throughout the entire process, from data collection and management to model training and fine-tuning, as well as simulation evaluation. The out-of-the-box GO-1 base model integrates a Video Training solution and a unified training framework, featuring a complete built-in development toolchain that enables one-click compilation and deployment on real robots, effectively enhancing development efficiency and accelerating the implementation and application of embodied intelligence technology.

In terms of community collaboration, although GO-1 was pre-trained only on data from the AgiBot G1 robot, it has undergone sufficient validation and testing on various platforms such as Agilex, ARX, and Franka Robotics, demonstrating excellent portability. In simulation environment tests, it has achieved leading performance on mainstream simulation platforms like Genie Sim and Libero. For real-robot deployment scenarios, to meet the diverse platform needs of users, the GO-1 model specifically integrates the universal LeRobot data format, ensuring that even non-Genie ontology robots are able to complete data collection, model fine-tuning, and deployment.
From now on, developers worldwide can access the AgiBot repository on GitHub to download the GO-1 model and embark on their embodied intelligence innovation journey. Whether seasoned AI researchers or industry newcomers, all will benefit from GO-1 for its robust technical support and limitless innovation possibilities
Media Contact
Organization: Shanghai Zhiyuan Innovation Technology Co., Ltd.
Contact Person: Jocelyn Lee
Website: https://www.zhiyuan-robot.com
Email:
media@zhiyuan-robot.com
City: Shanghai
Country:China
Release id:35228
The post AgiBot Has Built an Open-Source Ecosystem Supporting Data Collection and Deployment Across Different Ontology Platforms appeared first on King Newswire. This content is provided by a third-party source.. King Newswire makes no warranties or representations in connection with it. King Newswire is a press release distribution agency and does not endorse or verify the claims made in this release. If you have any complaints or copyright concerns related to this article, please contact the company listed in the ‘Media Contact’ section
Disclaimer: The views, suggestions, and opinions expressed here are the sole responsibility of the experts. No Emerald Journal journalist was involved in the writing and production of this article.